부품이송 시스템 제어
작성자 정보
- 작성자 관리자
- 작성일
컨텐츠 정보
- 조회 3,266
본문
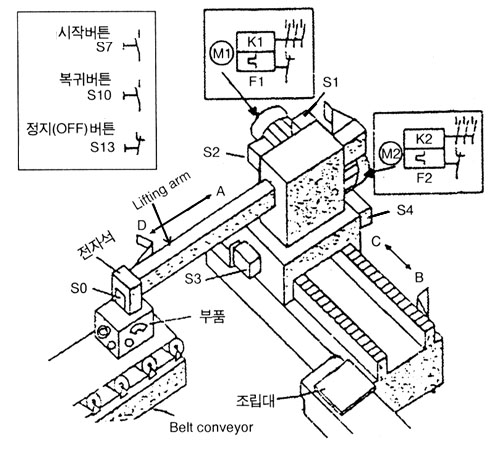
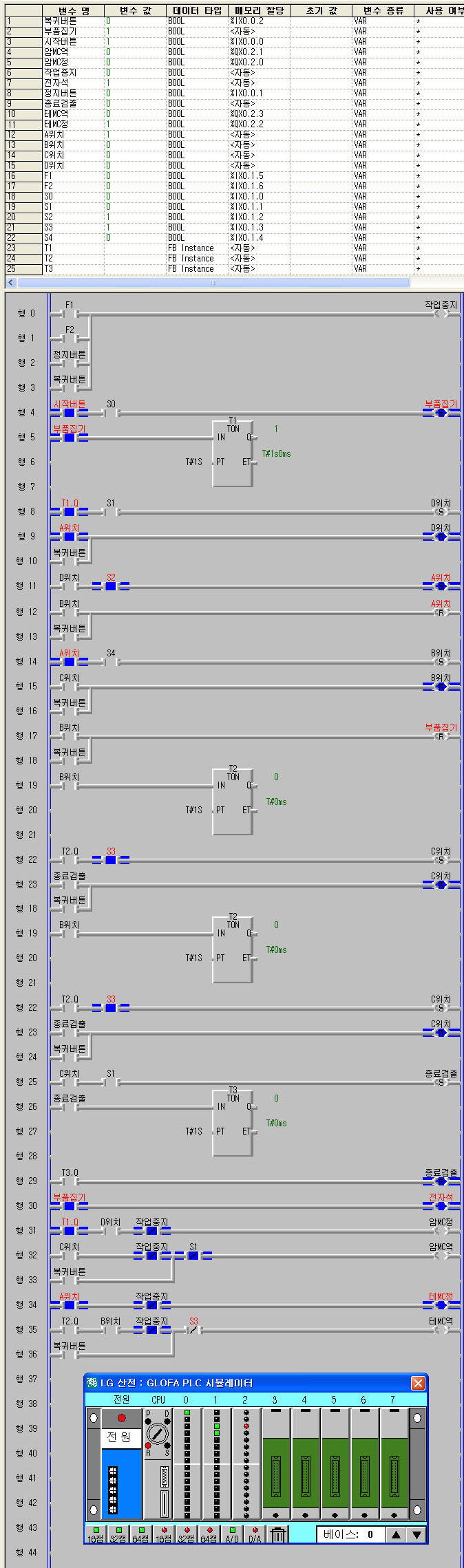
(초기상태:리프팅암이 벨트컨베이어위에 있다. S1_On)
=> 부품이 검출(S0_On)되면 전자석이 벨트 컨베이어의 끝에 도착한 부품을 집는다.
=> 1초후 리프팅 암MC1(정회전)이 동작하여 A위치(S2_ON)에 오면 정지한다.
=> A위치(S2_On)에 도착하면 테이블MC1(정회전)이 동작하여 B위치(S4_On)로 가면 정지한다.
=> B위치(S4_On)에 도착하면 전자석이 Off 되어 부품을 놓는다.
=>1초후 테이블MC2(역회전)가 동작하여 C위치(S3_On)로 가면 정지한다.
=> C위치(S3_On)에 도착하면 리프팅 암MC2(역회전)가 동작하여 D위치(S1_On)로 가면 정지한다.
=>1초후 시스템이 모두 정지된다.
=> 정지버튼(유지형)을 누르면 현재 상태에서 정지되고 놓으면 다시 진행된다.
복귀버튼을 암과 테이블은 역회전하여 원래 위치로 돌아가고, 초기위치로 복귀한다.
=> F1, F2에 의해 전동기는 과전류보호된다.
관련자료
-
링크
-
이전
-
다음
댓글 0개
등록된 댓글이 없습니다.